los_rwlock.c 文件参考
https://weharmony.github.io/openharmony/zh-cn/device-dev/kernel/kernel-small-basic-trans-rwlock.html 更多...
详细描述
https://weharmony.github.io/openharmony/zh-cn/device-dev/kernel/kernel-small-basic-trans-rwlock.html
基本概念
读写锁与互斥锁类似,可用来同步同一进程中的各个任务,但与互斥锁不同的是,其允许多个读操作并发重入,而写操作互斥。
相对于互斥锁的开锁或闭锁状态,读写锁有三种状态:读模式下的锁,写模式下的锁,无锁。
读写锁的使用规则:
保护区无写模式下的锁,任何任务均可以为其增加读模式下的锁。
保护区处于无锁状态下,才可增加写模式下的锁。
多任务环境下往往存在多个任务访问同一共享资源的应用场景,读模式下的锁以共享状态对保护区访问,
而写模式下的锁可被用于对共享资源的保护从而实现独占式访问。
这种共享-独占的方式非常适合多任务中读数据频率远大于写数据频率的应用中,提高应用多任务并发度。
运行机制
相较于互斥锁,读写锁如何实现读模式下的锁及写模式下的锁来控制多任务的读写访问呢?
若A任务首次获取了写模式下的锁,有其他任务来获取或尝试获取读模式下的锁,均无法再上锁。
若A任务获取了读模式下的锁,当有任务来获取或尝试获取读模式下的锁时,读写锁计数均加一。
- 版本
- 日期
- 2022-02-18
在文件 los_rwlock.c 中定义.
函数说明
◆ LOS_RwlockIsValid()
◆ OsRwlockCheck()


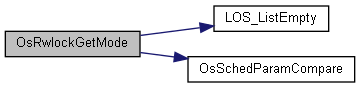
◆ OsRwlockGetMode()
| STATIC UINT32 OsRwlockGetMode | ( | LOS_DL_LIST * | readList, |
| LOS_DL_LIST * | writeList | ||
| ) |
获取读写锁模式
在文件 los_rwlock.c 第 381 行定义.
LITE_OS_SEC_ALW_INLINE STATIC INLINE BOOL LOS_ListEmpty(LOS_DL_LIST *list)
Identify whether a specified doubly linked list is empty. | 判断链表是否为空
Definition: los_list.h:321
INT32 OsSchedParamCompare(const LosTaskCB *task1, const LosTaskCB *task2)
Definition: los_sched.c:233
函数调用图:
这是这个函数的调用关系图:

◆ OsRwlockPostOp()
释放锁
在文件 los_rwlock.c 第 402 行定义.
414 if ((rwlockMode == RWLOCK_WRITE_MODE) || (rwlockMode == RWLOCK_WRITEFIRST_MODE)) {//如果当前是写模式 (有任务在等写锁涅)
428 while (!LOS_ListEmpty(&(rwlock->readList))) {//遍历读链表,目的是要唤醒其他读模式的任务(优先级得要高于pendedWriteTaskPri才行)
STATIC UINT32 OsRwlockGetMode(LOS_DL_LIST *readList, LOS_DL_LIST *writeList)
获取读写锁模式
Definition: los_rwlock.c:381
函数调用图:

这是这个函数的调用关系图:

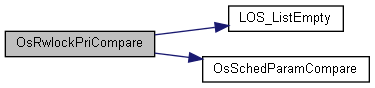
◆ OsRwlockPriCompare()
| STATIC BOOL OsRwlockPriCompare | ( | LosTaskCB * | runTask, |
| LOS_DL_LIST * | rwList | ||
| ) |

◆ OsRwlockRdPendOp()
在文件 los_rwlock.c 第 161 行定义.
STATIC BOOL OsRwlockPriCompare(LosTaskCB *runTask, LOS_DL_LIST *rwList)
指定任务优先级优先级是否低于 写锁任务最高优先级
Definition: los_rwlock.c:145
LOS_DL_LIST * OsSchedLockPendFindPos(const LosTaskCB *runTask, LOS_DL_LIST *lockList)
Definition: los_sched.c:519
Definition: los_list.h:82
UINT32(* wait)(LosTaskCB *runTask, LOS_DL_LIST *list, UINT32 timeout)
任务等待
Definition: los_sched_pri.h:245
函数调用图:

这是这个函数的调用关系图:

◆ OsRwlockRdUnsafe()
在文件 los_rwlock.c 第 252 行定义.
STATIC UINT32 OsRwlockRdPendOp(LosTaskCB *runTask, LosRwlock *rwlock, UINT32 timeout)
Definition: los_rwlock.c:161
函数调用图:
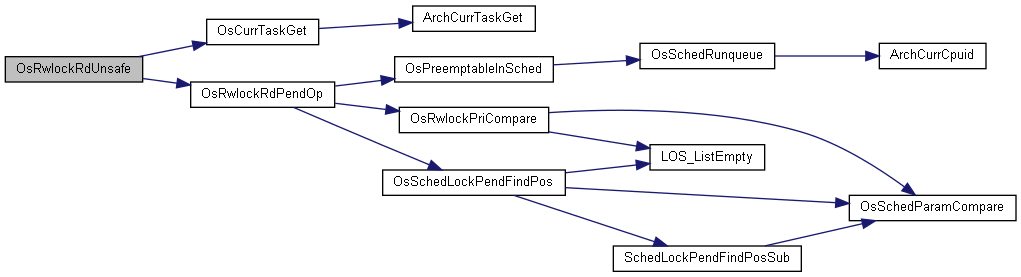
这是这个函数的调用关系图:

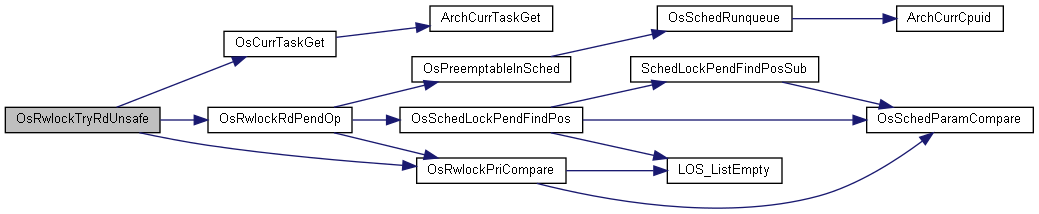
◆ OsRwlockTryRdUnsafe()

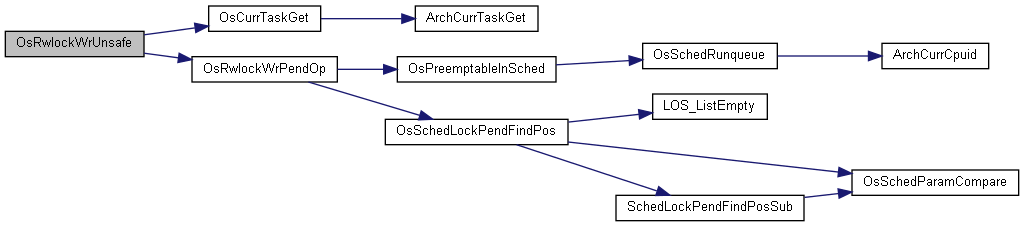
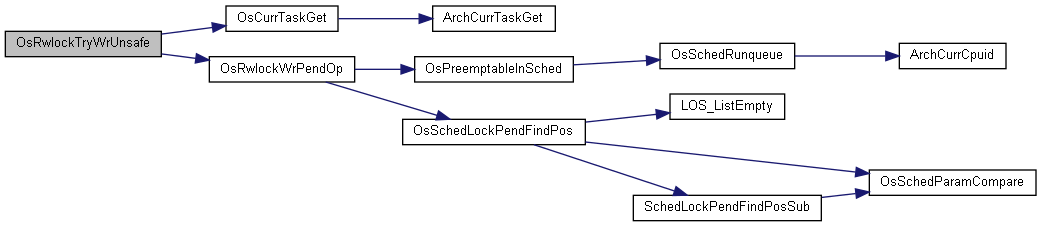
◆ OsRwlockTryWrUnsafe()
在文件 los_rwlock.c 第 299 行定义.
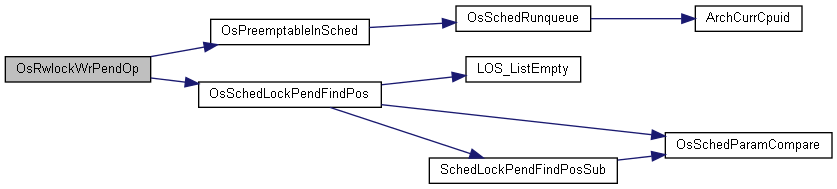
STATIC UINT32 OsRwlockWrPendOp(LosTaskCB *runTask, LosRwlock *rwlock, UINT32 timeout)
申请写模式下的锁
Definition: los_rwlock.c:209
函数调用图:
这是这个函数的调用关系图:

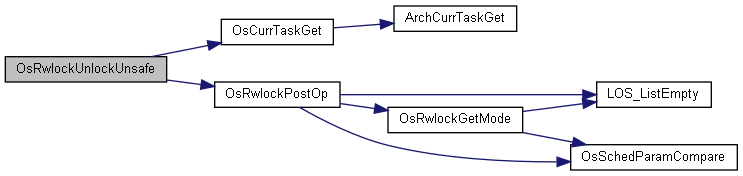
◆ OsRwlockUnlockUnsafe()
释放锁,唤醒任务
在文件 los_rwlock.c 第 449 行定义.
函数调用图:
这是这个函数的调用关系图: